Su Altı Robotik Gripper Buluşunda Türk İmzası



Artık Dalgıçlar tarafından yapılan birçok sualtı uygulmayı sualtı robotik sistemler yapmaktadır.(Arama Kurtarma-Sualtı Kaynağı-Mayın imha-Sualtı Kesme).
Gedik Üniversitesi Mühendislik Fakültesi Mekatronik Mühendisliği Bölüm Başkanı Yrd.Doç.Dr.Savaş DİLİBAL, nikel-titanyum şekil bellekli alaşımların üretimi ve robotik uygulamalarda kullanılması konusunda 1996 yılından bugüne akademik çalışmalarını sürdürmektedir. Yrd.Doç.Dr.Savaş DİLİBAL manipülatör eklem hareketleri, robotik el ve gripper sistemleri ile ilgili birçok prototip geliştirmiştir. Bunlardan bir tanesi de İTÜ`de geliştirdiği ITUHand robot eldir. Konu ile ilgili olarak, 2009-2010 yıllarında İllinois Üniversitesi (Urbana-Champaign, UIUC) Makine Mühendisliği Bölümünde doktora sonrası eğitimini tamamlamıştır. 2012-2014 yılları arasında NASA Glenn Araştırma Merkezinde Boeing tarafından üretilen ses-altı, sabit-kanat uçaklarda nikel-titanyum şekil bellekli alaşımların mekatronik aktuatör sistemi olarak kullanılması konusunda yürütülen NASA projesinde (NASA-NNX11AI57A) araştırmacı olarak görev yapmıştır. Proje kapsamında tel, levha, tüp ve bar şeklinde birçok NiTi şekil bellekli alaşımın izotermal ve izobarik koşullarda kuvvet, yer değiştirme ve kontrol değerlerini incelemiştir.
Florida Atlantik Üniversitesi Robotik Laboratuvarında çalışan Yrd.Doç.Dr.Erik D.Engeberg ile birlikte aldıkları patentte sualtı robotik sistemlerde kullanılabilecek iki ayrı mekatronik gripper prototipi geliştirmiştir. Konu ile ilgili Amerikalı akademisyen Erik D.Engeberg robotik kontrol alanında uzman bir araştırmacıdır. İstanbul’da yapılan Uluslararası İleri Robotik Konferansına (ICAR 2015) birlikte katılmışlardır. ( http://www.gedik.edu.tr/haberler/yrd-doc-dr-savas-dilibal-ieee-konferansina-katildi )
Nikel-titanyum (NiTi) şekil bellekli alaşımlar kullanılarak geliştirdikleri robotik gripper prototipleri için uluslararası patent (US 2015028994A1) alınmıştır.
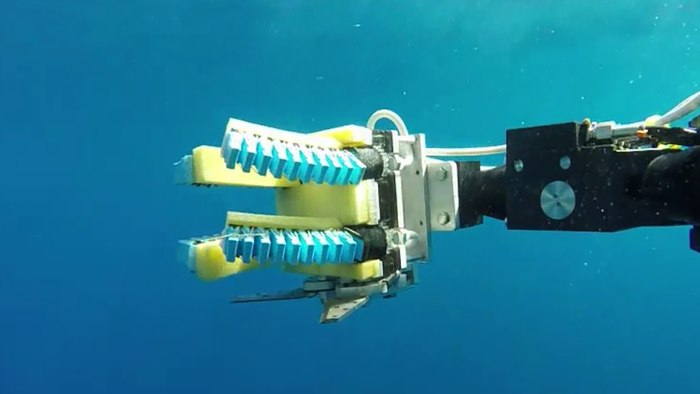
Sualtında dalgıçları tarafından yapılan birçok uygulama artık sualtı robotik sistemler kullanılarak yapılmaktadır. İnsansız sualtı araçları sualtı kaynak, mayın imha, sualtı kesme, arama kurtarma, gaz/petrol boru hatları muayeneleri ve sualtı arkeolojik çalışmalar başta olmak üzere birçok alanda kullanılmaktadır. İnsansız sualtı robotik sistemlerin en önemli parçalarından birisi; sualtı objeleri tutma, taşıma, tespit ve inceleme yapabileceği gripper (tutucu) kısmıdır. Yrd. Doç. Dr. Savaş DİLİBAL tarafından alınan patentte uygulanan teknik kullanılarak geliştirilecek nikel-titanyum gripper mekanizmaları sualtında insan elinin yapabileceği işlevlerin birçoğunu hassas olarak gerçekleştirebilecektir. Patentte yer alan sistemlerle ilgili sualtı deney sonuçlarından bazıları uluslararası Bioinspiration & Biomimetics dergisinde yayınlanmıştır. (http://iopscience.iop.org/article/10.1088/1748-3190/10/5/056002/meta).
Patent alınan prototiplerden birinin videosu;
http://www.gedik.edu.tr/haberler/uluslararasi-robotik-gripper-patenti web sayfasında görülebilir.
Patentte yer alan robotik gripper mekanizması, bugüne kadar geleneksel olarak kullanılan hidrolik, pnömatik veya elektrik motor sistemleri ile çalışan gripper mekanizmalarından farklı olarak nikel-titanyum (NiTi) şekil bellekli alaşımlar kullanılarak geliştirilmiştir. Gripper mekanizması içerisinde kullanılan nikel-titanyum şekil bellekli alaşımlar, fleksör/ekstansör kas yapısına benzer şekilde tutma/bırakma işlemini ısıtma ve soğutma ile antagonistik olarak gerçekleştirmektedir. NiTi şekil bellekli alaşımların gömülü olduğu sistem katmanlı üretim metoduyla 3D printer CAD model ile üretilmiştir. Geliştirilen gripper kontrol sistemi kapalı çevrimli pozisyon geri beslemeli akım kontrolü kullanılarak yapılmıştır.
Patentte geliştirilen aktif olarak sualtında çalışabilen gripper sistemi bugüne kadar geliştirilen gripper sistemlerine güçlü bir alternatif oluşturmaktadır. Nikel-titanyum gripper sistemi hafif, sessiz, korozyon dayanımı yüksek ve kompakt olarak çalışabildiğinden dolayı geleneksel gripper sistemlerine göre birçok üstün yönü bulunmaktadır. Ayrıca, sualtında sızdırmazlık gerektirmeyen ve yüksek basınçtan etkilenmeyen sorunsuz bir sistemdir. Elde edilen güç ile gripper ağırlık oranı değerlendirildiğinde, patenti sistemin diğer gripper sistemlerine göre çok daha yüksek güç/ağırlık oranına sahip olduğu görülmüştür. Nikel-titanyum gripper sisteminin oluşturulması geleneksel gripper sistemlerine göre daha ekonomiktir.
Henüz bir ödül alınmamış olan patentte yer alan gripper sisteminin, sualtı robotik alanında yapılacak yeni çalışmalara farklı bir boyut kazandırması beklenmektedir.
Redüktör Dergisi Reklamlar

URL: https://www.reduktordergisi.com/?p=5344